Introduction: The Critical Role of Precision Machining in Robotic Joints
The seamless, fluid motion of a robotic arm performing a complex assembly or a surgical robot conducting a delicate procedure is a marvel of modern engineering. This capability hinges on a single, critical element: the precision of its joints. Robotic joints are the mechanical pivots upon which the entire functionality, accuracy, and reliability of a robot depend. Any imperfection in these components—a micron of misalignment, a fraction of a degree of error—can cascade into significant performance failures, from reduced positional accuracy to catastrophic mechanical wear. This is where robotic joint machining transitions from a manufacturing step to a foundational discipline. It is the specialized process of creating the high-tolerance, complex geometries that allow robotic systems to move with the exactitude demanded by today’s autonomous applications. As the robotics market surges, projected to grow at a CAGR of 15.2%, the demand for such precision has never been higher, making advanced machining not just an advantage but an absolute necessity for innovation and reliability.
What is Robotic Joint Machining? Defining the Process and Its Importance
Robotic joint machining is a subset of precision manufacturing focused exclusively on fabricating the interconnected components that constitute a robot’s articulating points. It is far more than simply cutting metal; it is an integrated engineering process that combines advanced Computer Numerical Control (CNC) technology with deep material science and rigorous quality control to produce parts that meet extreme specifications. The process begins with a digital 3D model of the joint component, which is translated into machine instructions (G-code) that guide multi-axis cutting tools. These tools sculpt raw material—blocks of aluminum, titanium, or specialized alloys—into finished parts with geometries that often include intricate channels for wiring, precisely located mounting holes for sensors and actuators, and bearing surfaces finished to a mirror-like smoothness.
The importance of this specialized machining cannot be overstated. In a robotic system, joints are responsible for converting the rotational force of a motor into controlled, multi-directional movement. The machining process directly determines the joint’s structural integrity, its friction characteristics, its weight, and its ability to maintain alignment under load. A poorly machined gear within a joint will introduce backlash, causing the robot’s end-effector to shudder or drift. An inaccurately bored housing for a bearing will lead to premature wear and eventual seizure. Therefore, robotic joint machining is the critical bridge between a robot’s digital design and its physical capability. It ensures that the theoretical range of motion and payload capacity designed on a computer are fully realized in a durable, dependable mechanical component, enabling robots to perform repetitive, high-stakes tasks with unwavering consistency.
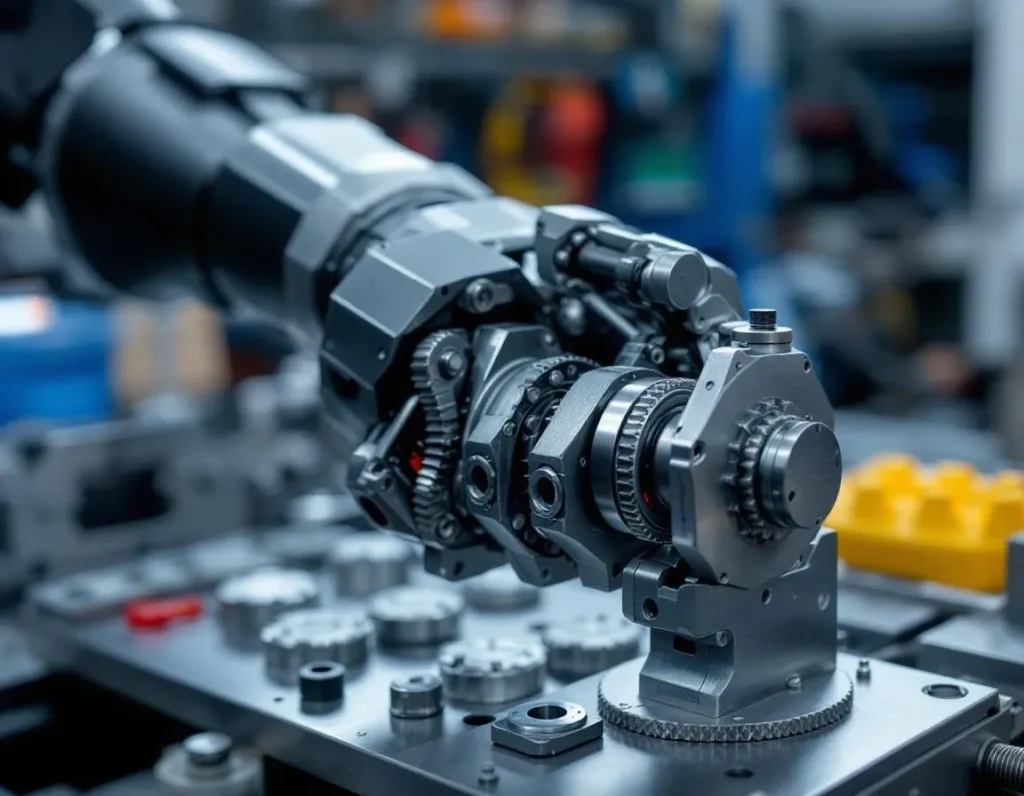
The Anatomy of a Robotic Joint: Key Components and Their Functions
To understand the machining challenges, one must first understand the mechanical anatomy of a typical robotic joint. It is a sophisticated assembly where precision-machined parts work in concert.
Housing/Body
This is the structural shell that contains and protects the internal mechanisms. Machined from a single piece of metal for maximum rigidity, it features precisely located bores and faces to which bearings, seals, and adjacent arm segments are mounted. Its geometry must ensure perfect alignment of all internal components.
Gears and Drivetrain Elements
These are the heart of motion transmission. High-precision gears—such as planetary, harmonic, or cycloidal types—reduce the high speed of the motor to high torque at the joint output. Each gear tooth profile must be machined to exacting standards to minimize friction, noise, and energy loss. Splines, shafts, and couplings are also critical machined elements within the drivetrain.
Bearings and Bushings
These components facilitate smooth rotation or linear motion while supporting radial and axial loads. Their mounting surfaces on housings and shafts must be machined to extremely tight tolerances and superior surface finishes to prevent misalignment, which would drastically reduce bearing life and introduce play.
Sensor Mounts and Integration Points
Modern joints are packed with feedback devices like encoders, resolvers, and torque sensors. Machined features include delicate mounting brackets, precisely indexed holes for sensor alignment, and internal passages for wiring harnesses. The accuracy of these machined features directly impacts the quality of the feedback data controlling the joint.
Each of these components is interdependent. The performance ceiling of the entire joint is defined by the precision of its least-accurate machined part, making holistic, high-tolerance machining across all components non-negotiable.
Types of Robotic Joints and Their Machining Requirements
Robots utilize different joint types to achieve various ranges of motion, each presenting unique machining demands. The two primary categories are rotary and linear joints, with several specialized variants.
Revolute (Rotary) Joints
This is the most common joint in articulated robot arms, functioning like a human elbow or knee, allowing rotational movement around a single axis. The machining focus here is on the components that enable pure, wobble-free rotation. The housing must have coaxial bores of identical diameter and perfect circularity to accept the bearings. The output shaft or flange must be machined with a high degree of concentricity to its rotation axis. Gears inside a revolute joint require exceptional tooth-to-tooth consistency to ensure smooth power transfer without periodic error or vibration.
Prismatic (Linear) Joints
These joints provide linear sliding motion, similar to a telescope or a drawer slide, and are common in gantry robots and robotic grippers. Key machined components include long, straight guide rails or shafts and matching bearing blocks (linear bushings or ball-screw nuts). The primary machining challenge is achieving exceptional straightness and surface finish over the entire length of the rail. Any deviation or roughness will cause stick-slip motion, reducing positioning accuracy and repeatability. Parallelism between multiple rails on the same axis is also critical.
Spherical and Universal Joints
Spherical joints allow rotation about multiple axes (like a human hip), while universal joints (U-joints) transmit rotation between misaligned shafts. These involve complex, multi-angled bearing surfaces and intricate yoke or socket geometries. Machining these requires advanced 5-axis CNC capabilities to machine the compound curves and intersecting bores from multiple angles within a single setup, ensuring all moving surfaces are perfectly mated.
Cylindrical and Planar Joints
A cylindrical joint combines rotation and linear sliding along the same axis. This demands machining for both rotary bearing surfaces and linear guide surfaces on the same component, requiring careful sequencing of operations. Planar joints allow movement in two perpendicular linear axes (like an XY table). Here, the machining requirement doubles down on the need for flatness, parallelism, and perpendicularity across large surface plates and the mating components that slide upon them.
Each joint type dictates a specific machining strategy. A revolute joint prioritizes concentricity and gear quality. A prismatic joint demands supreme straightness. A spherical joint necessitates multi-axis contouring. The common thread across all types is the uncompromising need for dimensional accuracy, geometric perfection, and surface integrity—requirements that are met through the capabilities of modern CNC machining centers, which we will explore in the next section.
CNC Machining: The Core Technology for Precision Robotic Components
As the specific requirements of each joint type make clear, the manufacturing process must be capable of translating intricate digital designs into flawless physical parts. This is where Computer Numerical Control (CNC) machining establishes itself as the indispensable core technology. CNC machining is a subtractive manufacturing process where pre-programmed computer software dictates the movement of factory tools and machinery. This digital control enables the production of three-dimensional parts from solid blocks of material with a level of precision, repeatability, and complexity that is unattainable with manual machining.
For robotic joints, this precision is non-negotiable. The interplay between a gear and a pinion, the smooth travel of a linear slide, and the seamless articulation of a spherical socket all depend on geometries held to tolerances often measured in microns (thousandths of a millimeter). CNC machines achieve this by operating with exceptional rigidity and using cutting tools whose paths are calculated to accuracies beyond human capability. The process begins with a 3D CAD model of the component, which is converted into a set of coordinates and instructions (G-code) for the machine. From there, the CNC mill or lathe executes a sequence of operations—drilling, turning, milling—with unwavering consistency, part after part.
The role of CNC machining extends beyond just shaping metal. It is integral to creating the very features that define a joint’s function. This includes machining the precise races for bearings, cutting the tooth profiles for gears, finishing the guide rails for linear motion, and creating the threaded holes for assembly and adjustment. Every surface finish, every chamfer, and every dimensional tolerance is directly controlled by the CNC program. This end-to-end control ensures that the final machined component will integrate perfectly with its mating parts, resulting in a joint assembly with minimal backlash, low friction, and predictable, reliable motion—the foundational qualities for any high-performance robot.
Material Selection for Robotic Joints: Balancing Strength, Weight, and Durability
The performance and longevity of a machined joint are inextricably linked to the material from which it is made. Selecting the right material is a critical engineering decision that balances often-competing demands: strength to withstand operational forces, low weight to maximize payload and efficiency, and durability to endure millions of cycles without failure. The optimal choice varies significantly based on the robot’s application, size, and environment.
For many industrial robotic arms, aluminum alloys like 6061 and 7075 are the workhorses. They offer an excellent strength-to-weight ratio, are highly machinable (which reduces production time and cost), and provide good corrosion resistance. 7075, in particular, is known for its high tensile strength, approaching that of some steels, making it suitable for highly stressed structural joint components. For applications where weight is a premium, such as in collaborative robots (cobots) or drones, magnesium alloys can be considered for even greater weight savings, though they come with higher material cost and different machining considerations.
When extreme strength, stiffness, or wear resistance is required, steel alloys are employed. Stainless steels, such as 304 or 316, provide excellent corrosion resistance for robots in harsh environments like food processing or marine applications. Alloy steels like 4140 or 4340 are heat-treatable to achieve very high strength and hardness for critical components like high-load gear shafts or bearing housings. The trade-off is significantly increased weight, which must be accounted for in the robot’s overall design and motor sizing.
At the pinnacle of performance for aerospace, medical, or high-end robotics applications are titanium alloys, notably Ti-6Al-4V. Titanium boasts a strength-to-weight ratio superior to both aluminum and steel, exceptional corrosion resistance, and excellent biocompatibility. However, it is expensive, challenging to machine due to its low thermal conductivity and tendency to work-harden, and thus reserved for applications where its unique properties justify the cost. Finally, engineered plastics and composites like PEEK or carbon-fiber reinforced polymers are increasingly used for specific non-structural or lightly loaded joint components where extreme weight reduction, self-lubrication, or electrical insulation is needed.
Advanced CNC Capabilities for Complex Joint Geometries (5-Axis, High-Speed)
Standard 3-axis CNC machining is sufficient for many prismatic parts, but the complex, organic geometries of modern robotic joints—especially spherical joints, multi-axis housings, and integrated structural components—demand more advanced capabilities. This is where 5-axis CNC machining and high-speed machining (HSM) become game-changers, pushing the boundaries of what is possible in a single setup.
5-axis CNC machining refers to the ability of a machine to move a cutting tool or a part along five different axes simultaneously. In addition to the traditional linear movements (X, Y, Z), it adds two rotational axes (typically A and B). This allows the tool to approach the workpiece from virtually any angle. For robotic joint machining, this capability is transformative. It enables the complete machining of complex contours, undercuts, and angled features—like the socket of a spherical joint or the mounting lugs on an articulated arm housing—without requiring multiple re-fixturings. This not only saves significant time but, more importantly, eliminates the cumulative error that can occur when moving a part between setups, guaranteeing higher overall accuracy and perfect alignment of interrelated features.
High-Speed Machining complements this by using specialized toolpaths, spindle speeds, and feed rates to remove material rapidly while maintaining precision and achieving superior surface finishes. HSM is particularly valuable for machining the delicate thin walls often found in lightweight robotic structures and for finishing complex curved surfaces without leaving visible tool marks. The combination of 5-axis and HSM allows for the production of monolithic, highly integrated joint components that consolidate what would have been an assembly of multiple parts into one. This consolidation reduces potential points of failure, improves stiffness, and simplifies the overall assembly process, leading to a more robust and reliable robotic joint.
Overcoming Challenges in Robotic Joint Machining: Tolerances, Integration, and Cost
Despite the power of advanced CNC technology, producing perfect robotic joints is fraught with significant engineering and manufacturing challenges. Successfully navigating these hurdles is what separates a functional prototype from a production-ready, reliable component.
Pushing the Limits of Tolerances and Surface Finish
The quest for zero backlash and minimal friction drives tolerance requirements to extreme levels. Holding concentricity within 0.005 mm on a revolute joint’s bearing seats or achieving surface flatness of 0.01 mm across a linear guide rail is commonplace. These tolerances are at the limit of standard machining capabilities and are influenced by a myriad of factors: thermal expansion of the machine and material, tool wear, and even ambient temperature fluctuations in the workshop. Overcoming this requires a holistic approach: using climate-controlled environments, implementing in-process probing and tool wear compensation, and employing post-process inspection with Coordinate Measuring Machines (CMM) to verify every critical dimension. The surface finish, measured in Ra (roughness average), is equally critical for sealing surfaces, bearing fits, and gear teeth, requiring precise control over cutting parameters and often secondary finishing processes like grinding or honing.
System Integration and IoT Readiness
A machined joint is rarely an island; it is a mechanical node that must seamlessly integrate with actuators, sensors, and wiring. Modern smart factories demand joints that are “IoT-ready.” This means the machining process must now accommodate integrated features for sensors, such as precisely machined cavities and bores for embedding encoders or force/torque sensors. Cable management becomes a design and machining consideration, requiring smooth internal conduits and strain relief features to prevent wear. Furthermore, components may need to be machined from materials compatible with embedded sensor systems or have specific electromagnetic properties. This adds a layer of design-for-manufacturability (DFM) complexity where the machinist must work closely with the robotics engineer from the earliest design stages.
Balancing Performance with Cost-Effectiveness
The high-performance materials and ultra-tight tolerances required for robotics naturally drive up cost. Titanium is expensive, and machining it is slow and hard on tools. Holding micron-level tolerances requires more machine time, advanced equipment, and rigorous quality control—all of which add cost. The challenge is to optimize the design and manufacturing strategy to control cost without sacrificing the performance essential for the joint’s function. This can be achieved through several strategies: intelligent material selection (using high-strength aluminum where possible instead of titanium), design simplification to reduce machining complexity, and the use of near-net-shape processes like forging or casting before final precision machining. Perhaps most importantly, partnering with a manufacturer experienced in high-precision robotics work can prevent costly redesigns and production errors, ensuring the most efficient path from design to a reliable, cost-effective component.
Quality Control and Testing: Ensuring Reliability in Machined Joints
The precision achieved during robotic joint machining is only as valuable as the quality control that verifies it. For a robotic joint, reliability is non-negotiable; a single component failure can halt an entire automated line or, in critical applications like surgery, have severe consequences. Therefore, a multi-layered QC regimen is integral to the manufacturing process, moving beyond simple pass/fail checks to a philosophy of continuous verification and traceability.
The foundation of this regimen is metrology. Coordinate Measuring Machines (CMMs) are indispensable for validating the complex 3D geometries of housings, gear profiles, and bearing seats. By comparing the machined part against its digital CAD model, CMMs can confirm that tolerances—often within microns—are held across the entire component. For surface finish, which is critical for minimizing friction and wear in moving joints, profilometers provide quantitative data on roughness (Ra values). This is especially important for gear teeth and sliding contact surfaces where improper finish can lead to premature failure and increased noise.
Non-destructive testing (NDT) methods play a crucial role in uncovering hidden flaws that could become failure points under stress. Dye penetrant inspection is used to detect surface cracks in materials like aluminum or steel, while eddy current testing can find sub-surface defects. For critical, high-integrity joints, particularly in aerospace or medical robotics, X-ray or CT scanning provides a complete internal view, revealing porosity in castings, voids, or internal stress fractures without damaging the part. This level of inspection ensures the structural soundness of the component before it ever sees a load.
Finally, functional and performance testing brings it all together. This involves assembling the machined joint components with their bearings, seals, and drives to test the actual articulation. Tests measure parameters like rotational stiffness, backlash, runout, and smoothness of motion across the entire range. Dynamic load testing simulates real-world operating conditions, cycling the joint thousands of times to validate its durability and identify any potential for fretting, loosening, or fatigue. This holistic approach to quality control—from dimensional verification to functional validation—is what transforms a precisely machined part into a reliable, high-performance robotic joint ready for integration.